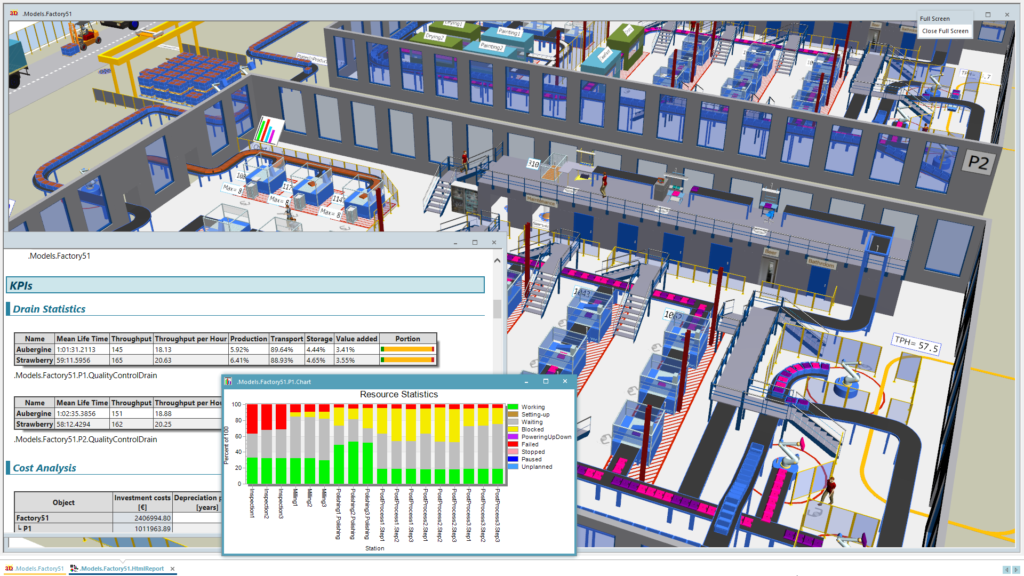

Fabricación digital: optimizada
Plant Simulation en el portafolio de Tecnomatix ® optimiza la fabricación al modelar y simular escenarios para sistemas de producción y sus procesos. Al analizar el flujo de materiales, la utilización de recursos y la logística para todos los niveles de planificación de fabricación, desde las instalaciones de producción global hasta las plantas locales y líneas específicas, el software Plant Simulation brinda a los fabricantes la capacidad de encontrar sus diseños óptimos mucho antes de la ejecución de la producción.
Tecnomatix Plant Simulation 16 ofrece nuevos avances para una optimización continua. La versión 16 ofrece una forma completamente nueva de trabajar con vehículos de guiado automático (AGV), vehículos que circulan por el suelo independientemente de un sistema de vía fija. Incluye una nueva estrategia de extracción de material similar a KANBAN basada en un concepto de supermercado con reordenamiento automático de piezas para lograr una fabricación más eficiente.
El nuevo soporte para el tipo de datos JSON simplifica la comunicación de servicios web de última generación con sus modelos de simulación. Una gran cantidad de nuevas capacidades facilitan la administración de modelos de simulación, incluida la actualización perfecta de los modelos creados con Teamcenter Wizard, así como mejoras en la colaboración PLM.
Además, numerosas mejoras en el flujo de materiales y la experiencia del usuario para los objetos de simulación existentes simplifican y aceleran el trabajo con Plant Simulation.
Vea los aspectos más destacados de Tecnomatix Plant Simulation 16
Patrón de acceso de control de conducción avanzado de AGV
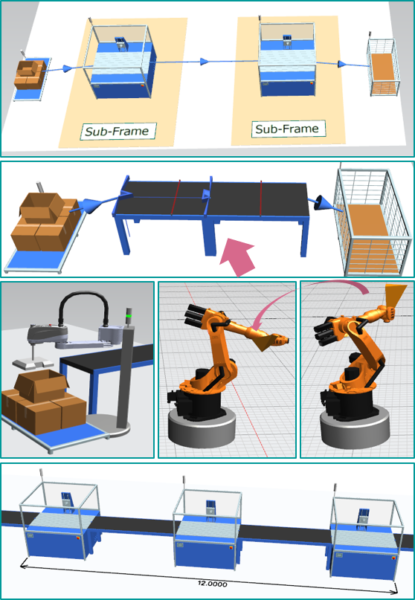
Plant Simulation 16 ofrece una forma completamente nueva de trabajar con vehículos guiados automatizados (AGV), vehículos que circulan por el suelo independientemente de un sistema de vía fija. Ahora puede definir su propia estrategia de conducción y control del administrador de flotas con fines de prueba. También puede conectar un software de control de administrador de flota externo a un modelo AGV de simulación de planta. Esto permite el soporte para casos de uso de puesta en servicio virtual para software de administrador de flota externo.
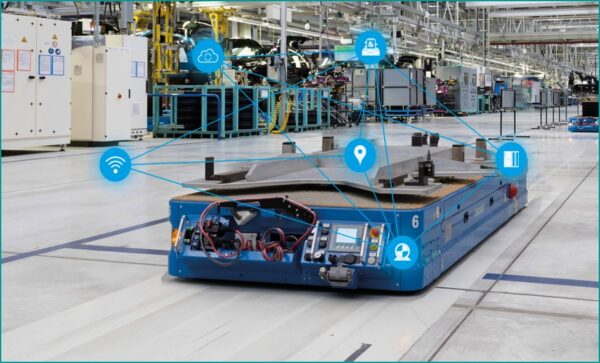
Simulación AGV para logística de producción avanzada
Casi todos los tipos de industrias necesitan aportar más flexibilidad a sus sistemas de producción. Los lotes pequeños y el flujo de una pieza son el resultado de órdenes de producción personalizadas. Los sistemas de producción actuales con enrutamiento de materiales impulsado por el producto y programación tardía o asignación de estaciones responden a estos desafíos de flexibilidad. Los sistemas transportadores estrechamente conectados o los monorraíles aéreos están siendo reemplazados por sistemas AGV inteligentes donde cada AGV se puede controlar individualmente.
Un nuevo conjunto de funcionalidades de conducción y control para el objeto transportador Plant Simulation permite a los usuarios simular y optimizar sistemas AGV avanzados en Plant Simulation.
Sistema AGV flexible: patrón de control de conducción avanzado
Los vehículos con sistemas AGV flexibles deben poder circular por el suelo, incluso sin un sistema fijo de pistas de conducción. El nuevo objeto transportador / AGV de simulación de planta mejorado admite este tipo de conducción en el suelo. Se incluyen varios patrones de conducción adicionales, como la rotación alrededor del eje zy la conducción en cualquier dirección.
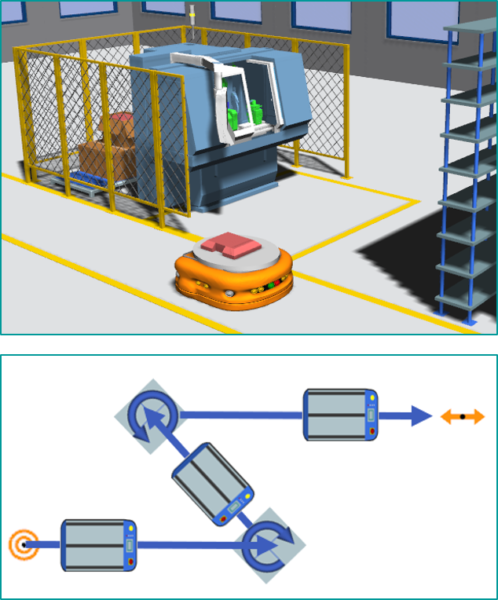
También hemos introducido objetos marcadores de conducción especiales para definir la ruta AGV. Usando un solo marcador o una lista de marcadores como ruta de conducción, el transportador encontrará su camino a lo largo de los marcadores. Por supuesto, el AGV utiliza sus parámetros de conducción como velocidad y aceleración, radio de curva y velocidad de rotación.
Con esta nueva funcionalidad, puede definir fácilmente su control AGV directamente en Plant Simulation y probar y validar su rendimiento con el gemelo digital simulado de su producción.
Sistema AGV flexible: puesta en servicio virtual del software de gestión de flotas (p. Ej., SIMOVE)
Las interfaces de puesta en marcha virtuales (PLCSIM Advanced, OPC UA, TCP / IP) le permiten conectar los modelos del sistema Plant Simulation AGV a un software externo de gestión de flotas. Esto abre escenarios de puesta en servicio virtual para la lógica de control y el rendimiento de un administrador de flota.
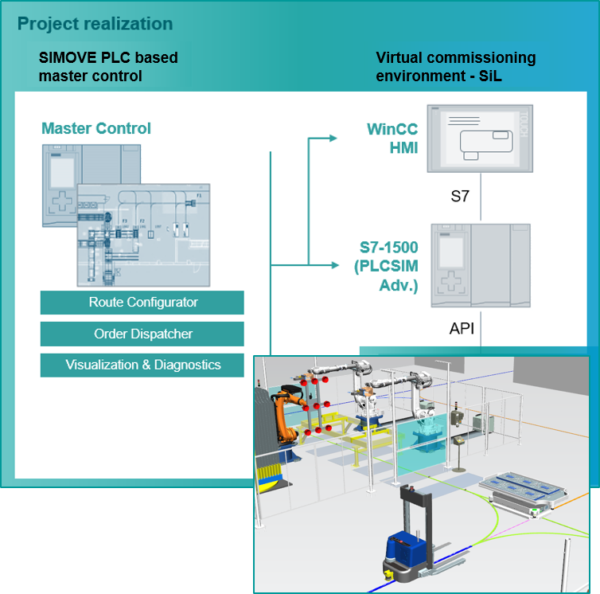
Ahora puede validar más fácilmente las estrategias de control de gestión de flotas y las HMI en condiciones realistas, KPI generales y estrategias de enrutamiento y control de AGV, entregando un software de gestión de flotas maduro en el taller y las pruebas de aceptación de fábrica.
Para la solución de gestión de flotas Siemens SIMOVE, puede acelerar sus proyectos con la biblioteca de transportadores SIMOVE de simulación de plantas dedicada.
Puesta en servicio virtual de AGV: interfaz de cliente MQTT para comunicación IIoT
Una novedad en la versión 16 es la compatibilidad con la interfaz de cliente MQTT (Eclipse Mosquitto – https://mosquitto.org) para la comunicación IIoT.
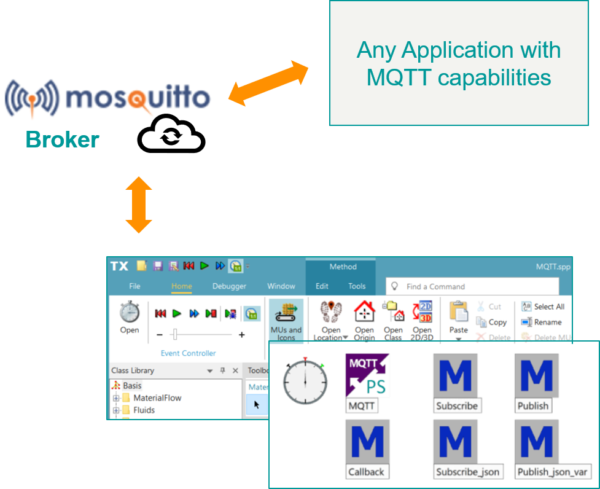
El protocolo MQTT proporciona un método ligero para realizar mensajes mediante un modelo de publicación / suscripción. Esto lo hace adecuado para la mensajería de Internet de las cosas con una amplia gama de aplicaciones, herramientas y maquinaria.
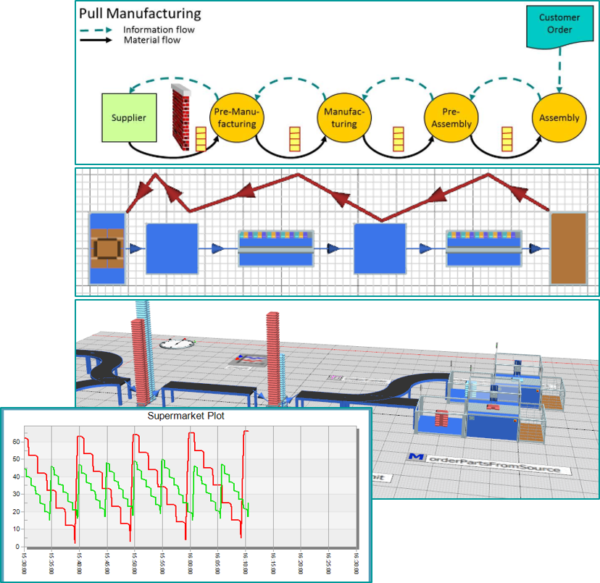
Estrategia de extracción de material similar a KANBAN para sistemas de fabricación ajustada con poco trabajo en progreso (WIP)
La versión 16 introduce una nueva estrategia de extracción de material similar a KANBAN. Esta estrategia se basa principalmente en un concepto de supermercado con reordenamiento automático de piezas cuando el stock baja. El supermercado con capacidad de stock y ajustes de nivel de pedido para muchos tipos de piezas en paralelo es el corazón de la extracción automática de material. Ayuda a reducir el trabajo en curso (WIP) y conduce a la fabricación ajustada.
Supermercado y atracción de materiales para una logística ajustada
Organizar y parametrizar la cadena de suministro de piezas y ensamblajes es una tarea importante para crear un sistema de producción ajustada que funcione bien. La nueva estrategia de extracción de material similar a KANBAN simplifica y acelera la creación de la logística de piezas en su modelo de simulación utilizando el supermercado Plant Simulation.
En un modelo típico de simulación de flujo de material, debe configurar la máquina y los parámetros del proceso, como la disponibilidad de la máquina y el tiempo de procesamiento de la pieza por máquina. En la mayoría de los casos, también debe reflejar la cadena de suministro de entrada para piezas y ensamblajes en su sistema de producción, asegurando que no haya escasez de piezas durante la producción.
Esto conduce a metodologías de flujo de valor y Kanban que mantienen el WIP bajo y el tiempo de rendimiento de los productos alto. Los miembros centrales de tales cadenas de suministro KANBAN son supermercados o centros logísticos con lógica de reorden específica de piezas. El nuevo supermercado Plant Simulation tiene un estándar incorporado para una estrategia de reorden de piezas impulsada por la demanda, enviando solicitudes de piezas nuevas automáticamente a un proveedor de piezas en el modelo.
Basándose en esta nueva funcionalidad, puede definir fácilmente experimentos de simulación y encontrar los mejores parámetros de configuración del supermercado, como stock superior y nivel de reorden por tipo de pieza.
Tipo de datos JSON para comunicarse con servicios web
Los modelos de simulación requieren varios conjuntos de datos de entrada, incluidas las órdenes de producción, el sistema de turnos y las configuraciones de personal, los parámetros de producción, la información del estado de la máquina, etc. El nuevo tipo de datos JSON simplifica la comunicación de servicios web de última generación con sus modelos de simulación, y se adapta a todos estos tipos de datos de entrada.

Puede utilizar directamente datos con formato JSON proporcionados por servicios web en el lenguaje de scripting SimTalk. JSON es la abreviatura de JavaScript Object Notation, un formato de archivo de texto simple para datos estructurados de cualquier tipo.
Asistente de Teamcenter para simulación de planta con actualización mejorada del modelo de simulación
El Asistente de Teamcenter ahora admite completamente la actualización de modelos de simulación que se han creado con el asistente y los datos de Teamcenter de una fase anterior del proyecto. El Asistente de Teamcenter ayuda a más y más ingenieros de simulación a realizar casos de uso estándar con datos de Teamcenter importados a Plant Simulation.
Ahora puede actualizar los modelos de simulación de plantas con nuevos datos de planificación, importar y actualizar procesos y operaciones, agregar y eliminar estaciones y máquinas, integrar la simulación de flujo de materiales en los flujos de trabajo de planificación iterativa y mucho más. Ésta se convierte en su única fuente de verdad para los datos de planificación.
Mejoras en la colaboración PLM
Las mejoras en la colaboración PLM facilitan el trabajo con datos administrados en modelos de simulación. La importación cinemática manual a través de Teamcenter ahora puede usar archivos de exportación creados sin referencias legibles a Teamcenter. Esto es compatible a través de la interfaz SimTalk.
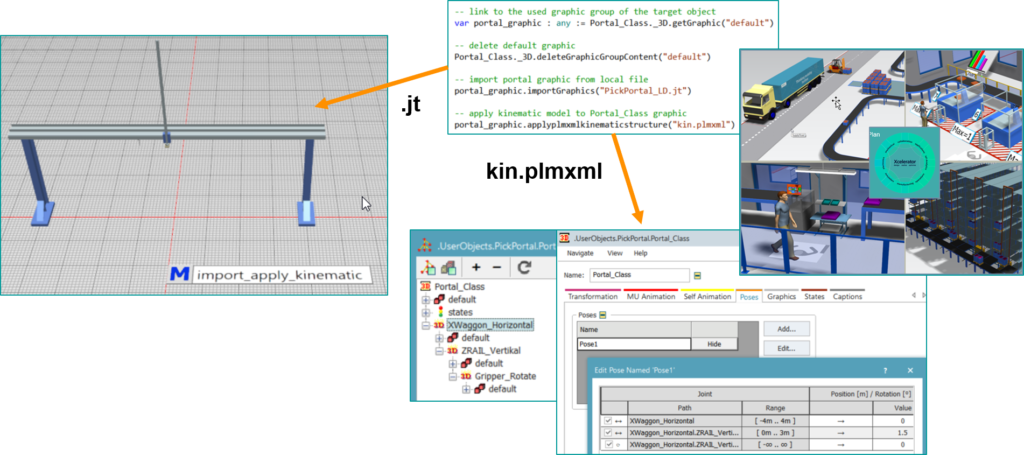
Las mejoras incluyen el intercambio y la reutilización de datos en un contexto PLM, la importación y el uso de la cinemática PLMXML, la seguridad mejorada y el control de acceso para los datos PLM utilizados en los modelos de Plant Simulation, flujos de trabajo PLM sin fisuras para la planificación y la ingeniería, y una integración más estrecha de PLM con Plant Simulation.
Mejoras en el flujo de materiales y la experiencia del usuario para aumentar la productividad del modelado
Numerosas mejoras adicionales en el flujo de materiales y la experiencia del usuario para los objetos de simulación ya existentes simplifican y aceleran el trabajo con Tecnomatix Plant Simulation. Los conectores mejorados simplifican la configuración y el uso de objetos de marco definidos por el usuario, lo que hace que el trabajo con módulos y estaciones sea mucho más intuitivo.
Plant Simulation 16 incluye cambios de diseño simplificados para transportadores y sistemas de orugas, lugar de trabajo con funcionalidad de capacidad (muchos operadores en una estación), soporte para cinemática de robot de 6 ejes en 3D Pick & Place y objetos de robot, robot / cinemática de Pick & Place de tipo SCARA predefinido en 3D, dimensionamiento de gráficos en vistas 3D, más flexibilidad en el reenvío de piezas desmontadas desde la estación de desmontaje, creación automatizada de gráficos de rack sensibles a los parámetros de rack y ranura, e indexación secuencial para el objeto PlaceBuffer para respaldar el comportamiento de la línea de amortiguación que se utiliza a menudo en la fabricación de piezas discretas.
La versión 16 incluye la importación directa de archivos de piezas NX, lo que elimina la necesidad de producir primero un archivo JT. También hemos implementado un formato de almacenamiento de archivos / carpetas que permite el uso de Git y SCCS para respaldar el desarrollo de modelos colaborativos dentro de grupos de ingenieros de simulación y para garantizar el rendimiento de la simulación y la facilidad de uso del modelado en modelos a gran escala.
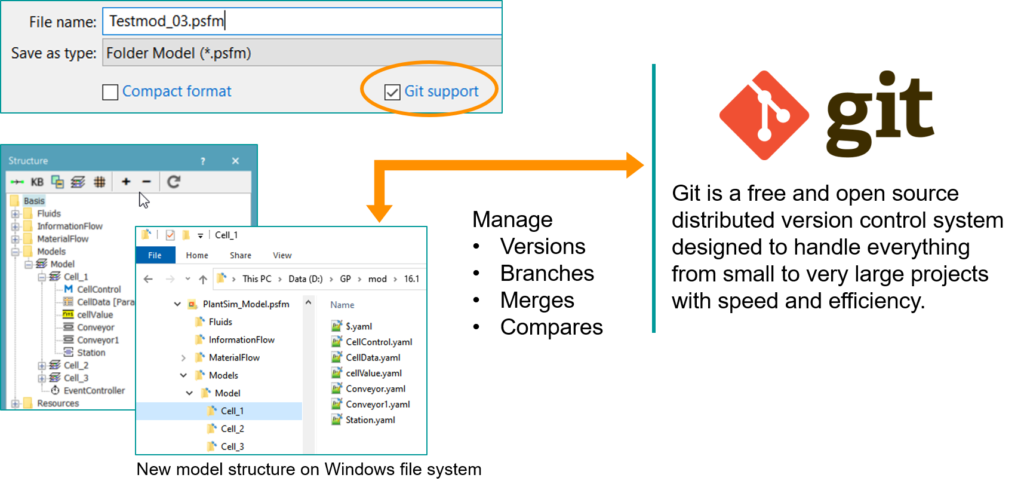
Git y otras herramientas del sistema de control de código fuente (SCCS) pueden detectar y mostrar diferencias en las ramas de sus archivos de modelo de simulación. Esto le permite resaltar las diferencias del modelo en las secciones del modelo nuevo o modificado, aceptar o descartar el contenido modificado y fusionar las ramas del modelo en una nueva versión del modelo.
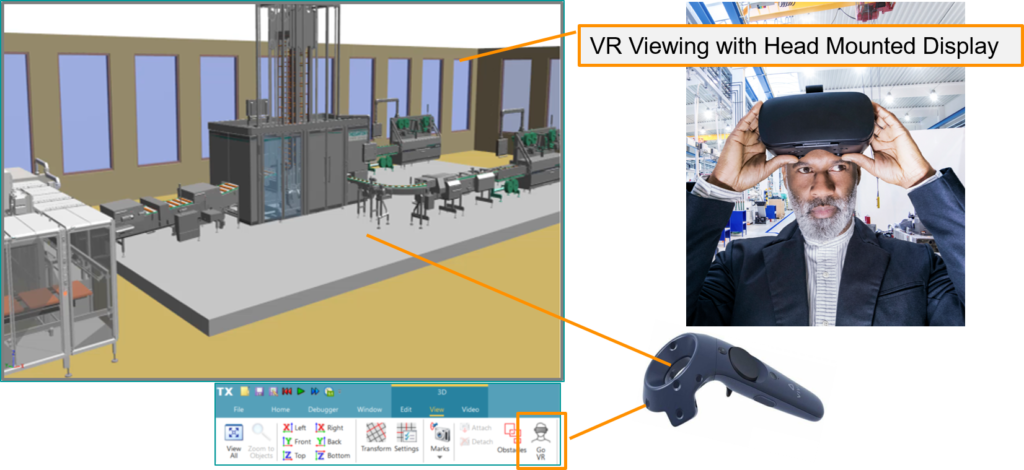
Plant Simulation 16 le brinda la capacidad de sumergirse directamente en el modelo para la animación de realidad virtual utilizando una pantalla y controladores HTC Vive montados en la cabeza. En versiones anteriores, esto solo era posible con aplicaciones complementarias de terceros.
Articulo tomado de https://blogs.sw.siemens.com/tecnomatix/whats-new-in-plant-simulation-august-2021/